Who Am I ?
About Me
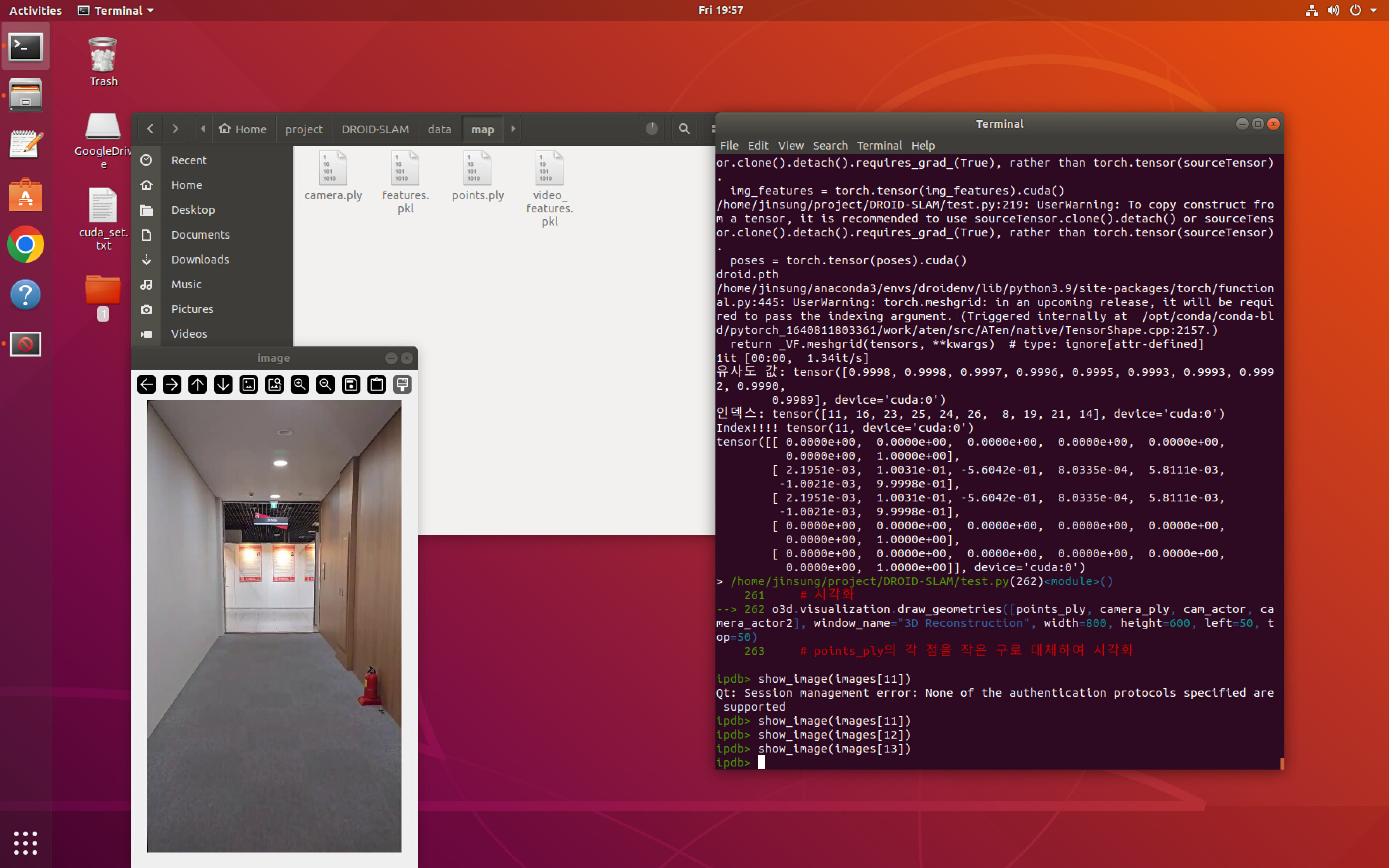
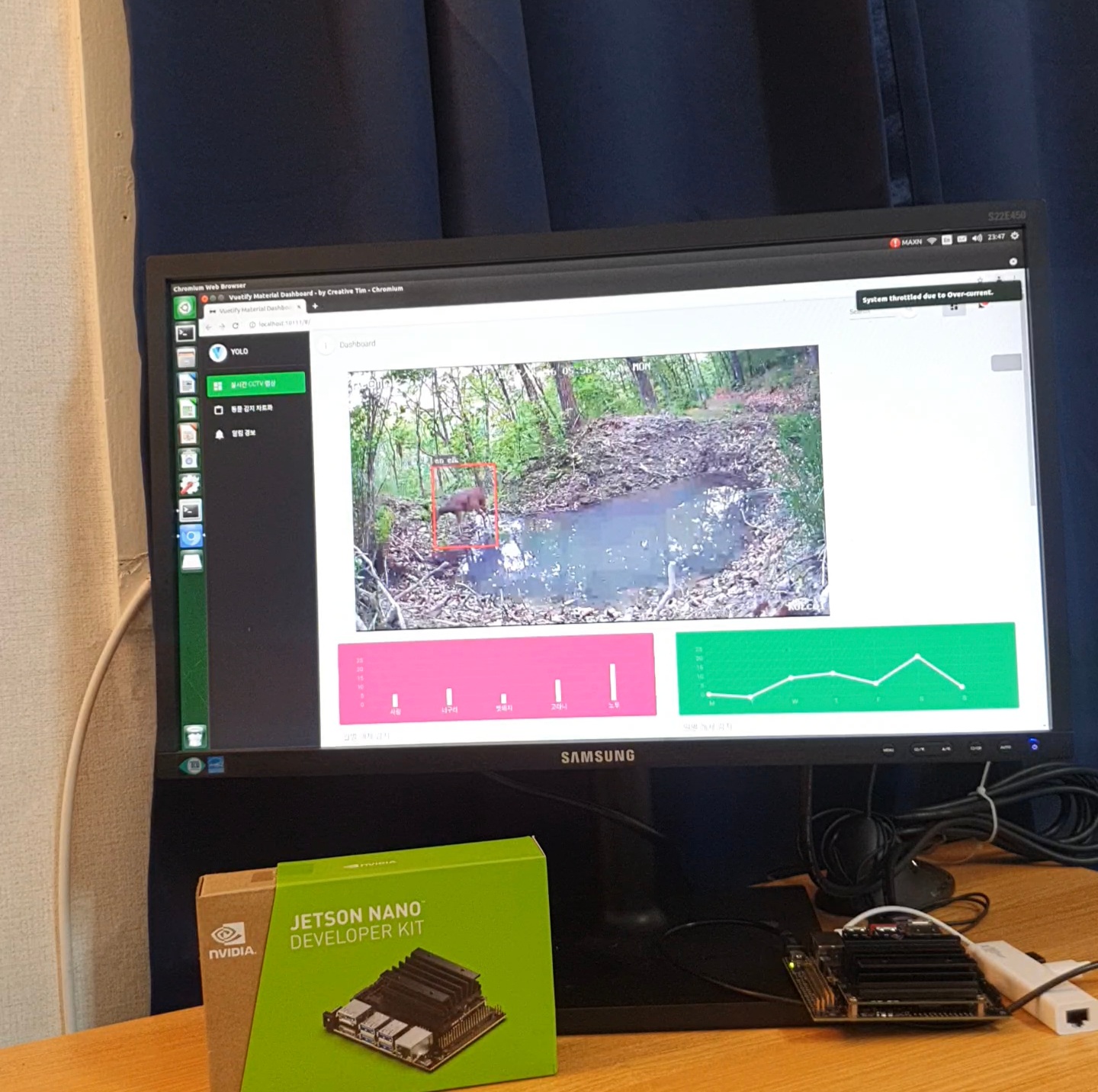
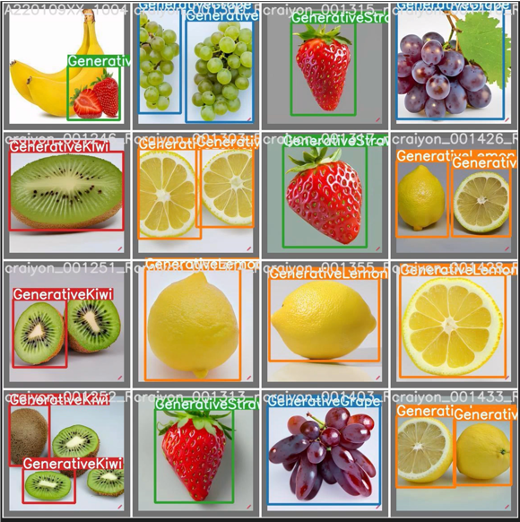
저는 경북대학교 인공지능학과 석사 과정을 수행하며 컴퓨터 비전, 딥러닝, 임베디드 AI 시스템을 연구해왔습니다. 학사 과정에서는 Jetson Nano 기반 야생동물 탐지 시스템을 개발하며 YOLO 아키텍처를 활용한 실시간 객체 탐지와 모델 경량화 경험을 쌓았고, 석사 과정에서는 Haga 회사와 협업하여 SLAM 기반 공간 인지 시스템과 CLIP 멀티모달 통합 연구를 수행했으며, 임베디드 시스템에 탑재 가능한 실제 서비스를 구현하여 현재 운영 중이며 End to End AI 파이프라인 구축 역량을 확보했습니다. 딥러닝 모델의 일반화 성능 향상 연구를 수행하며 이종 학습률과 가중치 융합 기법을 논문화하였으며, AI 챔피언 대회에서는 딥페이크 생성 차단 기술 연구로 650개 팀 중 7등을 달성하며 정보통신평가원장상과 상금 500만원을 수상했습니다. 이러한 연구 경험과 모델 최적화 기술을 바탕으로 실제 산업 환경에서 안정적으로 작동하는 고성능 AI 시스템을 구현하고, 자율주행 및 임베디드 시스템 분야에서 실용적 가치를 창출하는 ML 엔지니어로 성장하고자 합니다.